File:Triple torus illustration.png
Size of this preview: 640 × 450 pixels.
| |
This is a file from the Wikimedia Commons. Information from its description page there is shown below.
Commons is a freely licensed media file repository. You can help. |
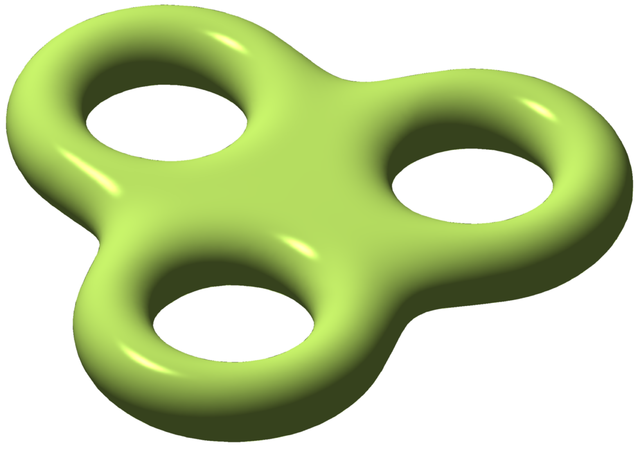
| Description | Illustration of a triple torus | ||
| Date | 18:01, 7 September 2007 (UTC) | ||
| Source | Own work, MATLAB source code below
|
||
| Author | Oleg Alexandrov |
 |
I, the copyright holder of this work, release this work into the public domain. This applies worldwide. In some countries this may not be legally possible; if so: I grant anyone the right to use this work for any purpose, without any conditions, unless such conditions are required by law.
|
 |
This math image could be recreated using vector graphics as an SVG file. This has several advantages; see Commons:Media for cleanup for more information. If an SVG form of this image is already available, please upload it. After uploading an SVG, replace this template with {{ vector version available|new image name.svg}}. |
Source code ( MATLAB)
function main() % illustration of a triple torus % torus radii r = 1; R = 3; Kb = R+r; Ks = R-r; % Km controls the smoothness of the transition from one ring to the others Km = 0.5125*Kb; L = 2.5*(r+R); h = 0.2; % grid size X = (-L):h:L; m = length(X); Y = (-L):h:L; n = length(Y); Z = (-1.1*r):h:(1.1*r); k = length(Z); W = zeros(m, n, k); for i=1:length(X) for j=1:length(Y) x = X(i); y = Y(j); [x, y] = triple_torus_function (x, y, r, R, Kb, Km); val = (sqrt(x^2+y^2)-R)^2-r^2; W(i, j, :) = val + Z.^2; end end figure(1); clf; hold on; axis equal; axis off; light_green=[184, 224, 98]/256; % light green H = patch(isosurface(X, Y, Z, W, 0)); isonormals(X, Y, Z, W, H); mycolor = light_green; set(H, 'FaceColor', mycolor, 'EdgeColor','none', 'FaceAlpha', 1); set(H, 'SpecularColorReflectance', 0.1, 'DiffuseStrength', 0.8); set(H, 'FaceLighting', 'phong', 'AmbientStrength', 0.3); set(H, 'SpecularExponent', 108); daspect([1 1 1]); axis tight; colormap(prism(28)) view(-12, 40); % add in a source of light camlight (-50, 54); lighting phong; print('-dpng', '-r400', ... sprintf('Triple_torus_illustration.png')); function [x, y] = triple_torus_function (x, y, r, R, Kb, Km) % a deformation in the plane, which, when comosed with a torus will give % a triple torus % centre of one of the torii O = [-Kb, -Kb/sqrt(3)]; angle = 2*pi/3; Mat = [ cos(angle) -sin(angle); sin(angle) cos(angle) ]; p =[x, y]'; phi = atan2(y, x); if phi >= pi/6 & phi <= 5*pi/6 p = Mat*p; % rotate 120 degree counterclockwise elseif phi >= -pi/2 & phi < pi/6 p = Mat*p; p = Mat*p; % rotate 240 degrees counterclockwise end x=p(1); y = p(2); % reflect against a line, to merge two cases in one if y > x/sqrt(3) p = [x, y]; v = [cos(2*pi/3), sin(2*pi/3)]; p = p - 2*v*dot(p, v)/dot(v, v); x = p(1); y = p(2); end if x > O(1) % project to the y axis, to a point B if y < O(2) A = [O(1), y]; B = [0, y]; else A = O; p = [x, y]; rho = norm(p-O); B = O+(Kb/rho)*(p-O); % t = -O(1)/(x-O(1)); % B = [0, O(2)+t*(y-O(2))]; end p = [x, y]; d=norm(p-A); q = norm(B-A); d = my_map(d, q, Km); p = (d/q)*B+(1-d/q)*A; x=p(1); y=p(2); end % shift towards the origin x = x-O(1); y = y-O(2); function y = my_map(x, Kb, Km) if x > Kb y = Km + 1; elseif x < Km y = x; else y = Km+sin((pi/2)*(x-Km)/(Kb-Km)); end
File usage
The following pages on Schools Wikipedia link to this image (list may be incomplete):
About Schools Wikipedia
Through Schools Wikipedia, SOS Children's Villages has brought learning to children around the world. SOS Children's Villages believes education is an important part of a child's life. That's why we ensure they receive nursery care as well as high-quality primary and secondary education. When they leave school, we support the children in our care as they progress to vocational training or higher education. There are many ways to help with SOS Childrens Villages.